CAVA
Software voor voertuigcompliance
Ervoor zorgen dat voertuigontwerpen efficiënt voldoen aan wereldwijde compliancenormen
Wat is CAVA?
Voertuigconformiteit is een verplicht onderdeel van auto- en vliegtuigontwerpen. CAVA (CATIA Automotive Extensions Vehicle Architecture) is een gespecialiseerde softwareoplossing die is ontworpen om voertuigontwerpen te valideren aan de hand van internationale normen en voorschriften. Het integreert naadloos met CATIA V5- of 3DEXPERIENCE-platforms en biedt een uitgebreide reeks tools voor het analyseren van cruciale voertuiggegevens zoals botszones, zicht van de bestuurder, passagiersposities, ruitenwisserzones en de veiligheid van inzittenden en voetgangers.
CAVA biedt OEM’s en leveranciers over de hele wereld een betrouwbare, efficiënte methode om de wettelijke naleving van voertuigontwerpen en -architectuur te garanderen.

Wat kun je doen met CAVA?
CAVA biedt een reeks functies en mogelijkheden die ontworpen zijn om het ontwerp- en conformiteitsproces van voertuigen te stroomlijnen.
Impactzone-analyse
Voor het evalueren van voertuigontwerpen aan de hand van veiligheidsnormen voor impactzones om de bescherming van inzittenden te garanderen.
Optimaliseer zichtbaarheid
Voor het analyseren en optimaliseren van het gezichtsveld van de bestuurder om te voldoen aan de wettelijke vereisten.
Passagierscomfort en veiligheid
Voor het beoordelen van passagiersposities en veiligheidsvoorzieningen om het comfort en de naleving te verbeteren.
Ruitenwisser dekking
Om ervoor te zorgen dat de ruitenwissers van de voorruit het vereiste gezichtsveld bestrijken voor veilige rijomstandigheden.
Compleet voertuigpakket
Voor het beheren van voertuigparameters, zoals afmetingen en stoelposities.
Waarom CAVA gebruiken?
CAVA biedt tal van voordelen voor organisaties die nalevingscontroles naadloos willen integreren in hun voertuigontwerpproces.
CAVA vereenvoudigt het compliance verificatieproces, zodat ontwerpers relevante standaarden kunnen selecteren en hun ontwerpen kunnen valideren zonder het platform te verlaten. Deze integratie vermindert de operationele tijd en kosten doordat er geen fysieke prototypes meer nodig zijn.
Door de belangrijkste ontwerpparameters en analysefuncties geïntegreerd te houden in de hele ontwikkelingscyclus, zorgt CAVA voor een gestandaardiseerde aanpak van voertuigontwerp en -conformiteit, waardoor de efficiëntie en betrouwbaarheid toenemen.
CAVA ondersteunt virtuele homologatie, voorziet uw teams van betrouwbare en gevalideerde gegevens van productontwikkeling en zorgt ervoor dat de wettelijke bepalingen tijdens het hele proces worden nageleefd.
CAVA is in CATIA geïntegreerd als een aparte V5 workbench of 3DEXPERIENCE App, wat betekent dat CAVA-functies direct met de CAD-gegevens worden opgeslagen. Het stelt engineers in staat om te valideren of het ontwerp voldoet aan internationale regelgeving (bijv. voetgangersveiligheid, zichtbaarheid, doorrijhoogte) terwijl ze in CATIA werken. CAVA automatiseert nalevingscontroles binnen het parametrische modelleringssysteem van CATIA, waardoor er minder handmatig werk nodig is.
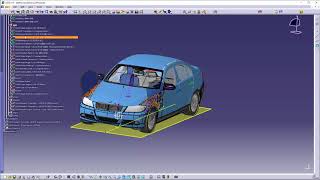
CAVA OVA voor complete voertuigpakketten
CAVA OVA maakt naadloos ontwerpen en verifiëren van complete voertuigpakketten mogelijk, zodat de plaatsing van onderdelen al in de conceptfase nauwkeurig is. Stroomlijn het ontwerpproces en verminder kostbare revisies door te evalueren of de locaties van onderdelen binnen de aangewezen ontwerpgrenzen vallen, van lampen tot nummerplaten en veiligheidsgordels.
CAVA OVA ondersteunt het volledige voertuigontwerpproces van concept tot homologatie, vermindert de afhankelijkheid van fysieke prototypes en verlaagt de kosten met de validatie van digitale modellen. De gestandaardiseerde methodologie zorgt ervoor dat de belangrijkste ontwerpparameters en analysefuncties tijdens de ontwikkeling geïntegreerd blijven, waardoor een consistente en efficiënte workflow ontstaat. CAVA OVA helpt bij de nauwkeurige plaatsing van componenten, zodat wordt voldaan aan regelgeving en industrienormen voor een betrouwbaar en geoptimaliseerd ontwerpproces.
Organiseer relevante parameters op een centrale locatie. Definieer voertuiggrootte, wielgrootte, bestuurder- en inzittendenpositie. Definieer verschillende grondvlakken om belastingsconfiguraties te accommoderen.
Analyseer statische en dynamische stoeprandvrijheden. Meet helling-, aankomst- en vertrekhoeken. Creëer het algehele grondvrijheidsoppervlak.
Krijg begeleiding en verificatie over lamptypes en hun vereiste absolute en relatieve posities. Verifieer grootte, locatie en verlichting van kentekenplaten. Controleer plaatsing van veiligheidsgordel bevestigingen en kinderbeveiligingssystemen. Controleer wielbedekking door het spatbord. Meet pedaalvrijheden.
Creëer vangrails en slingervormen bij lage snelheid. Bereken de eerste contactpunten van barrières met het beladen voertuig. Beschikbaar voor frontale, zijdelingse en achterwaartse botsingen.
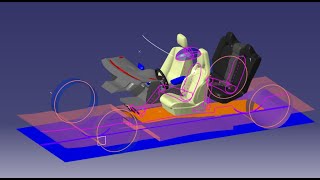
CAVA Manikin voor comfort en veiligheid van passagiers
De SAE-normen definiëren een tweedimensionale testpop voor het bepalen van de zitposities van inzittenden. De CAVA Manikin maakt een nauwkeurige positionering mogelijk op basis van geometrische richtlijnen of specifieke gewrichtshoeken. Door gebruik te maken van hoofdpositiecontouren, handbereikomtrekken en oogaanzichten kunnen belangrijke SAE-parameters zoals hoofdruimte, handbereik en beenruimte worden geverifieerd, zodat aan de industrienormen wordt voldaan.
CAVA Manikin stroomlijnt het proces van het bepalen van de juiste zitposities, bespaart tijd en verbetert de nauwkeurigheid. Het maakt het mogelijk om snel standaard oogpunten en oog ellipsen te creëren voor gezichtsveld analyse, efficiënte meting van hoofdruimte en validatie van hoofdsteun veiligheid, waardoor een betrouwbare en gestandaardiseerde benadering van de positionering van inzittenden wordt gegarandeerd.
Deze functie creëert de 2D Manikin-sjabloon in verschillende percentagegrootten. Bied praktische positioneringsmethoden voor specifieke doeleinden zoals beschreven in de SAE J826-standaard. Definieer het zitplaatsreferentiepunt gebaseerd op hiel-, vloer- en pedaalreferentiepunt en/of aanbevolen gewrichtshoeken. Definieer pedaalgeometrie en hielpunt gebaseerd op zitplaatsreferentiepunten, vloergeometrie en gewrichtshoeken. Meet beenruimte in de achterste stoelen (lang gekoppelde en kort gekoppelde situatie). Controleer op botsing met geometrie (voorstoel, dashboard, etc.). Bied SRP-locatiecurves SAE J4004 als referentie.
Bereken de vrije hoogte tot het dak in verticale en diagonale richtingen volgens SAE J1052.
Berekent de backset en hoogte zoals gemeten met het hoofdsteunmeetapparaat (HMD) volgens FMVSS 202 en NCAP. Controleert of de vereiste breedte, hoogte en dakruimte van een hoofdsteun wordt bereikt.
Creëert de standaard oogpunten volgens UNECE-R 125 voor verschillende doeleinden in zicht- en spiegelanalyse. Creëert ellipsen volgens SAE J941 zoals vereist voor FMVSS-zichtcontroles. Ondersteunt verschillende definities op basis van standaardjaar en doel.
Deze functie helpt bij het bepalen van de bereikzone van de bestuurder zoals gedefinieerd in SAE J827. Berekent de algemene pakketfactor uit de basisgegevens van de stoel. Houdt rekening met het type veiligheidsgordel en populatiemix. Handenvelop berekend voor volledige handgreep, 3-vingergreep en uitgestrekte vingergreep.

CAVA Vision voor optimalisatie van het zicht van de bestuurder
CAVA Vision helpt voertuigontwerpers bij het beoordelen van wettelijke vereisten en ergonomische overwegingen met betrekking tot het directe en indirecte zicht van de bestuurder. Het maakt de analyse mogelijk van kritieke aspecten zoals zicht op de weg, zicht op verkeerslichten vanaf een bepaalde afstand en obstakels op het dashboard veroorzaakt door het stuurwiel. Door deze functionaliteiten te integreren, zorgt CAVA Vision ervoor dat de regelgeving wordt nageleefd terwijl het comfort en het zicht van de bestuurder worden geoptimaliseerd.
CAVA Vision beoordeelt het directe en indirecte zicht via spiegels of camera-beeldschermen. Het maakt ook virtuele homologatie van achteruitkijkspiegels mogelijk, waarbij de resultaten vaak worden geaccepteerd door EU-certificeringsinstanties, zodat er minder fysieke tests nodig zijn. Daarnaast verbetert CAVA Vision het ergonomische ontwerp door het zicht van de bestuurder en de ondersteuning bij het rijden te optimaliseren, wat zorgt voor een veiligere en efficiëntere rijervaring. Het ondersteunt wettelijke vereisten in verschillende regio’s, waaronder UNECE, US FMVSS, GSO, AIS en ADR.
Berekent de ‘gezichtsvelden’ in de voorruit (UNECE-R 43, FMVSS 104, …). Berekent A-pijler obstructies (UNECE-R 125). Berekent referentiepunten en zichtvlakken (UNECE-R 125 supp.3). Analyseert optische eigenschappen zoals dubbele hoek en optische vervorming (UNECE R-43).
Creëert het vereiste zichtveld op de weg of op een muur/scherm achter de auto voor de belangrijkste standaarden zoals UNECE-R 46, FMVSS 111. Creëert automatisch de oogpunten of oogellipsen die door de standaard vereist zijn. Analyseert buiten- en binnenspiegels. Definieert de spiegel parametrisch of met behulp van een spiegeloppervlak. Berekent de vereiste dekking en obstructiewaarden met duidelijke indicatie of de standaard wordt vervuld. Ondersteunt spiegels voor bedrijfsvoertuigen: UNECE klasse II, IV, V, VI en VII.
Direct View 3D: Creëert de geobstrueerde gebieden op de weg of op een muur rond een auto vanuit de gezichtspunten van de bestuurder. Analyseert en detecteert obstructies van het stuurwiel tot het dashboard.
Zicht van dichtbij: Detecteer zichtbaarheid van cilindrische objecten rond de auto en identificeer en evalueer dode hoeken (MLIT 619/2002 Att.81, FMVSS 111, UNECE-R 125). Ondersteunt gecombineerd direct zicht, spiegelzicht en camerazicht.
Gezichtsvelden van camera’s: Berekent de zichtkegel (vision cone) voor een camera en visualiseert de zichtbare gebieden op de weg, muur of andere objecten. Ondersteunt door de gebruiker gedefinieerde zichtkegels: kegelvormig, piramidaal, aangepast per sectie of oppervlak. Berekent het gecombineerde zicht van een set camera’s (zoals voor kunstmatig “surroundzicht”). Toepasbaar voor optische camera’s, maar ook voor vergelijkbare sensoren met een gedefinieerde zichtkegel, zoals ultrasone en thermische beeldvorming en radar zoals gebruikt in ruimtevaarttoepassingen.

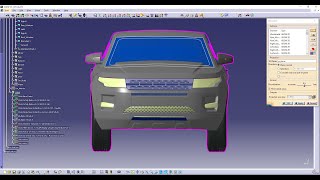
CAVA Safety voor impactzone-analyse
CAVA Safety helpt bij het verifiëren van de veiligheidseisen voor zowel voetgangers als inzittenden. Met de tool kunnen markeringslijnen en botszones voor verplichte fysieke botsproeven aan de buitenkant van een voertuig worden berekend en geanalyseerd. Het identificeert ook overtredingen van de minimale radius op zowel exterieur- als interieuronderdelen zoals bumpers, roosters, spiegelbehuizingen, dashboards en deuren, zodat de veiligheidsvoorschriften worden nageleefd.
Met CAVA Safety kunnen ontwerpers op efficiënte wijze botsproeven met het hoofd en de benen voorbereiden op digitale modellen in overeenstemming met wettelijke normen zoals UNECE R-127 en richtlijnen voor consumentenbescherming zoals NCAP. De tool vermindert de afhankelijkheid van fysieke prototypes, bespaart tijd en kosten en stroomlijnt tegelijkertijd de identificatie van minimale radiusovertredingen voor naleving van de regelgeving. Bovendien levert het certificeringsdocumentatie die vereist is door regelgevende instanties.
De bescherming van voetgangers berekent de referentiecurven, botspunten en gebieden voor hoofd- en beenbotsingen aan de voorkant van het voertuig, volgens de ECE-R 127 en Euro NCAP voorschriften.
De veiligheidsradius-functie controleert de buitengeometrie van het voertuig als de minimaal vereiste radius wordt geschonden. Het houdt rekening met de bereikbaarheid met de testbol en de specifieke radii voor bumperzone, lamp en grillelementen.
De functie voor minimale radius controleert de binnengeometrie van het voertuig om te zien of de minimaal vereiste radius wordt overschreden. Het berekent de bots- en uitsluitingszones voor het hoofd, houdt rekening met de bereikbaarheid met de testslinger en de specifieke radiusvereisten voor elke zone.
De functie voor projectiemeting berekent de hoogte van uitstekende elementen in doorsneden met behulp van de methode met twee aanrakingscirkels volgens UNECE-R 21 en UNECE-R 26. Hiermee kun je doorsnedetekeningen maken zoals vereist door certificeringsinstanties.
Controleer de voertuigvereisten voor de veiligheid van voetgangers en inzittenden

CAVA Wiper voor ruitenwisser dekking
Met CAVA Wiper kunnen gebruikers de geometrie van een wissysteem simuleren om het wisoppervlak op de voorruit te bepalen. In combinatie met de gezichtsveldfunctie in CAVA Vision is het mogelijk om het percentage van het wisoppervlak binnen het gezichtsveld van de bestuurder te controleren. De tool berekent en visualiseert ook belangrijke parameters die de kwaliteit van het wissen beïnvloeden, zodat een optimaal ontwerp wordt gegarandeerd.
Met CAVA Wiper kunnen gebruikers ruitenwissersystemen definiëren met maximaal drie ruitenwissers voor zowel voor- als achterruiten, terwijl veelgebruikte ruitenwisserkinematica wordt ondersteund. Het voldoet aan de wettelijke eisen en kan eenvoudig worden aangepast aan regionale normen zoals UNECE en FMVSS. Daarnaast biedt het visualisatietools, zoals kleurenkaarten en 2D-grafieken, om de wiskwaliteit te beoordelen, zodat het ontwerp snel kan worden geoptimaliseerd. Met een flexibel rapportagemechanisme kunnen berekende parameters eenvoudig worden geëxporteerd naar Excel of tekstrapporten.
Definieer een wissysteem met maximaal 3 wissers. Ondersteunt drie wissertypes: Standaard, parallel en trapezium. Gebruik elke wisseropstelling: onder/boven gemonteerd, rechtsom/linksom draaiend, vlinder, voor en achter. Bereken het wisoppervlak op de voorruit. Gebruik de ‘gezichtsvelden’-functie van CAVA Vision om te controleren of het wisoppervlak voldoet aan de wettelijke vereisten volgens UNECE-R 43 of FMVSS 104. Bepaal automatisch de geldige rotatiehoek voor een bepaalde bladgrootte.
De belangrijkste kwaliteitsparameters van het resultaat van het wissen beoordelen, waaronder de krommingsstraal van het blad op de voorruit, de normale afwijking tussen blad en voorruit (aanvalshoek), de vouwhoek en vouwafstand (stijging en daling) en de doorzakwaarde (buiging van het blad). Weergave van berekende waarden als kleurenkaart of vectorfeedback op het windscherm. Weergave als curve diagram voor waarden langs het blad voor gegeven hoek.
De geometrie van een wissysteem simuleren om het wisoppervlak op de voorruit te bepalen

CAVA Tools voor extra CAVA-functionaliteit
CAVA Tools is een verzameling CAVA-functies die beschikbaar zijn in de ‘CAVA All’-bundel of als afzonderlijk product, waardoor de CAVA-technologie ook beschikbaar is voor klanten buiten de automobielsector.
De functie Silhouette biedt de mogelijkheid om met één klik de contouren van een compleet voertuig te projecteren. Dit helpt bij het maken van homologatietekeningen inclusief metingen van belangrijke parameters zoals lengte, breedte en hoogte.
























































Hoe CAVA kopen
Op zoek naar licenties voor CAVA? Wil je een demo zien om te begrijpen wat CAVA kan doen? Of met een expert spreken voordat je een beslissing neemt?
CAVA is er in alle soorten en maten. Wij zijn er om ervoor te zorgen dat je het juiste softwarepakket voor je team krijgt.
Hulp nodig bij het ontwerp en de conformiteit van voertuigen?
Neem contact op met onze experts
Arnd Feye en team werken al 20 jaar samen met klanten om oplossingen te ontwikkelen die het portfolio van Dassault Systèmes perfect aanvullen. Neem vandaag nog contact op voor een gratis adviesgesprek.
